
Abstract
Background
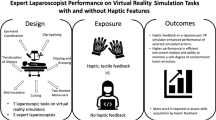
There is an increasing need for efficient training simulators to teach advanced laparoscopic skills beyond those imparted by a box trainer. In particular, force-based or haptic skills must be addressed in simulators, especially because a large percentage of surgical errors are caused by the over-application of force. In this work, the efficacy of a novel, salient haptic skills simulator is tested as a training tool for force-based laparoscopic skills.
Methods
Thirty novices with no previous laparoscopic experience trained on the simulator using a pre-test–feedback–post-test experiment model. Ten participants were randomly assigned to each of the three salient haptic skills—grasping, probing, and sweeping—on the simulator. Performance was assessed by comparing force performance metrics before and after training on the simulator.
Results
Data analysis indicated that absolute error decreased significantly for all three salient skills after training. Participants also generally decreased applied forces after training, especially at lower force levels. Overall, standard deviations also decreased after training, suggesting that participants improved their variability of applied forces.
Conclusions
The novel, salient haptic skills simulator improved the precision and accuracy of participants when applying forces with the simulator. These results suggest that the simulator may be a viable tool for laparoscopic force skill training. However, further work must be undertaken to establish full validity. Nevertheless, this work presents important results toward addressing simulator-based force-skills training specifically and surgical skills training in general.







Similar content being viewed by others


References
Roberts KE, Bell RL, Duffy AJ (2006) Evolution of surgical skills training. World J Gastroenterol 12(20):3219–3224
Panait L, Akkary E, Bell RL, Roberts KE, Dudrick SJ, Duffy AJ (2009) The role of haptic feedback in laparoscopic simulation training. J Surg Res 156(2):312–316
Singapogu R, Smith D, Burg T, Pagano C, Long L, Prabhu V (2012) Assessing surgeon and novice force skill on a haptic stiffness simulator for surgical training. In: Medicine Meets Virtual Reality (MMVR) 19, Los Angelos, CA
Singapogu RB, Smith DE, Long LO, Burg TC, Pagano CC, Burg KJL (2012) Objective differentiation of force-based laparoscopic skills using a novel haptic simulator. J Surg Educ 69(6):766–773
Fried GM, Feldman LS, Vassiliou MC, Fraser SA, Stanbridge D, Ghitulescu G, Andrew CG (2004) Proving the value of simulation in laparoscopic surgery. Ann Surg 240(3):518–525 discussion 525–528
Aggarwal R, Moorthy K, Darzi A (2004) Laparoscopic skills training and assessment. Brit J Surg 91(12):1549–1558
Chan ACW, Chung SCS, Yim APC, Lau JYW, Ng EKW, Li AKC (1997) Comparison of two-dimensional vs three-dimensional camera systems in laparoscopic surgery. Surg Endosc 11(5):438–440
Breedveld P, Wentink M (2001) Eye–hand coordination in laparoscopy: an overview of experiments and supporting aids. Minim Invasive Ther Allied Technol 10(3):155–162
Westebring-van der Putten EP, Goossens RH, Jakimowicz JJ, Dankelman J (2008) Haptics in minimally invasive surgery: a review. Minim Invasive Ther Allied Technol 17(1):3–16
Figert PL, Park AE, Witzke DB, Schwartz RW (2001) Transfer of training in acquiring laparoscopic skills. J Am Coll Surg 193(5):533–537
Fried GM (2008) FLS assessment of competency using simulated laparoscopic tasks. J Gastrointest Surg 12(2):210–212
Sroka G, Feldman LS, Vassiliou MC, Kaneva PA, Fayez R, Fried GM (2010) Fundamentals of laparoscopic surgery simulator training to proficiency improves laparoscopic performance in the operating room: a randomized controlled trial. Am J Surg 199(1):115–120
Richards C, Rosen J, Hannaford B, Pellegrini C, Sinanan M (2000) Skills evaluation in minimally invasive surgery using force/torque signatures. Surg Endosc 14(9):791–798
Singapogu RB, Pagano CC, Burg TC, Burg KJL, Prabhu VV (2011) Role of haptic feedback in a basic laparoscopic task requiring hand–eye coordination. Stud Health Technol Inform 163:591–593
Singapogu RB, Pagano CC, Burg TC, Burg KJL (2011) Perceptual metrics: towards better methods for assessing realism in laparoscopic simulators. Stud Health Technol Inform 163:588–590
Withagen R, Michaels CF (2005) The role of feedback information for calibration and attunement in perceiving length by dynamic touch. J Exp Psychol Hum Percept Perform 31(6):1379–1390
Tang B, Hanna GB, Cuschieri A (2005) Analysis of errors enacted by surgical trainees during skills training courses. Surgery 138(1):14–20
Wagner CR, Stylopoulos N, Jackson PG, Howe RD (2007) The benefit of force feedback in surgery: examination of blunt dissection. Presence Teleoperators Virtual Environ 16(3):252–262
Deml B, Ortmaier T, Seibold U (2005) The touch and feel in minimally invasive surgery. In: IEEE international workshop on haptic audio visual environments and their applications, 2005, Ottawa, OT, Canada p 6
Mayer H, Nagy I, Knoll A, Braun EU, Bauernschmitt R, Lange R (2007) Haptic feedback in a telepresence system for endoscopic heart surgery. Presence Teleoperators Virtual Environ 16(5):459–470
Tuijthof GJM, Horeman T, Schafroth MU, Blankevoort L, Kerkhoffs GMMJ (2010) Probing forces of menisci: what levels are safe for arthroscopic surgery. Knee Surg Sports Traumatol Arthrosc 19:248–254
Zhou M, Perreault J, Schwaitzberg S, Cao C (2008) Effects of experience on force perception threshold in minimally invasive surgery. Surg Endosc 22(2):510–515
Moody L, Baber C, Arvanitis TN, Elliott M (2003) Objective metrics for the evaluation of simple surgical skills in real and virtual domains. Presence Teleoperators Virtual Environ 12(2):207–221
Thompson JR, Leonard AC, Doarn CR, Roesch MJ, Broderick TJ (2010) Limited value of haptics in virtual reality laparoscopic cholecystectomy training. Surg Endosc 25:1107–1114
Zhou M, Tse S, Derevianko A, Jones DB, Schwaitzberg SD, Cao CG (2011) Effect of haptic feedback in laparoscopic surgery skill acquisition. Surg Endosc 26(4):1128–1134
Salkini MW, Doarn CR, Kiehl N, Broderick TJ, Donovan JF, Gaitonde K (2010) The role of haptic feedback in laparoscopic training using the LapMentor II. J Endourol 24(1):99–102
Chmarra M, Dankelman J, van den Dobbelsteen J, Jansen F-W (2008) Force feedback and basic laparoscopic skills. Surg Endosc 22(10):2140–2148
Acknowledgments
The authors thank Giovannina Arcese for her assistance in collecting data, and also acknowledge the contribution of Varun Prabhu, Ryan Bontreger, Billy Few, and Pallavi Srikanth in designing and refining the haptic simulator.
Disclosures
Authors R. Singapogu, S. DuBose, L. Long, D. Smith, T. Burg, C. Pagano, and K. Burg have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Singapogu, R.B., DuBose, S., Long, L.O. et al. Salient haptic skills trainer: initial validation of a novel simulator for training force-based laparoscopic surgical skills. Surg Endosc 27, 1653–1661 (2013). https://doi.org/10.1007/s00464-012-2648-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-012-2648-y