1. Introduction
Quality of sleep is crucial for physical and mental health and thus could affect human lives, socially and financially [
1,
2]. There is indeed a variety of sleep disorders, such as sleep related breathing disorders, hypersomnia, parasomnia, circadian rhythm disorders, and sleep related epilepsy [
3], that have been affecting the daily activities of human beings [
4,
5]. Sleep stage estimation, or so-called sleep scoring, therefore plays an important role in improving human lives, by helping to diagnose sleep disorders and evaluate the quality of sleep.
Polysomnography (PSG), which has been used for adaptive segmentation to classify sleep stages [
6] and for the detection of sleep disorders using multi-modal bio-signals and movement information from video polysomnography [
7,
8], is one of these sleep monitoring methods. Because PSG is complex, expensive, and uncomfortable for subjects, another simple method, actigraphy, which scores sleep stages based on movement detection from a wristband device, has also been utilized [
9]. This method enables subjects to perform the experiments in their familiar and comfortable home environments [
10]. In addition, sleep monitoring based on the pressure-body movement-sleeping model [
11] has been conducted, employing a flexible force sensitive sensor mattress to gather and monitor pressure signals from the subject.
Traditionally, sleep scoring analysis of actigraphs has been achieved via preprocessing, statistical feature extraction, and linear classification algorithms based on activity based sleep-wake identification [
12]. Among the various traditional methods, the Cole–Kripke [
13] and Sadeh [
12] algorithms, which could distinguish between sleeping and awake states using predefined rule based models, are the most popular. However, these methods are quite vulnerable to unexpected deviations of input data patterns, caused by ambient noises or movement artifacts, owing to their handcrafted methods [
14,
15].
Conventionally, machine learning methods have been applied for physical abnormality detection [
16,
17]. Especially, sleep scoring using machine learning has shown great success. Dhongade et al. utilized linear discriminant analysis (LDA) and principle component analysis (PCA) to extract features from electroencephalogram (EEG) signals and then classified them into either sleep disorder or normal [
18]. Moeynoi and Kitjaidure conducted sleep stage scoring using statistical features of EEG signals via simple statistical techniques and canonical correlation analysis to obtain the correlations among the feature vectors of the dataset [
19]. For sleep scoring application, five machine learning methods, which include the kstar classifier, bagging, random committee, random subspace, and random forest, were applied by Yeo et al. [
9] in a study where features of accelerometer data from a wristband sensor were trained and classified into wake, rapid eye movement (REM), and light and deep stages. The naive Bayes algorithm, which has been utilized to predict sleep apnea severity and sleepiness [
20], was trained based on demographics and polysomnogram and electrocardiogram EEG signals. However, several conventional machine learning algorithms depend on feature engineering, which is based mostly on predefined and handcrafted models and thus could be suboptimal for nonstationary and nonlinear biosignal data [
21].
Recently, deep neural networks (DNNs) have been developed and have remarkably improved classification performances in various areas of study [
22]. A DNN model using convolutional neural network (CNN) has been applied to the classification problem of sleep scoring based on EEG data [
23,
24] and electrocardiogram (ECG) data [
25]. CNN has been, moreover, employed for activity recognition based on wrist worn accelerometer data [
26], where CNN outperformed conventional machine learning algorithms such as SVM and LDA. In [
27], a sequential CNN model outperformed the other CNN structures like multi-task learning based CNN. The CNN architecture has an advantage of capturing high level information that is directly related to the problem [
28]. However, researchers still are using predefined model based features [
29], such as Fourier based synchronization features using handcrafted sinusoidal basis functions [
30], before the CNN classification process.
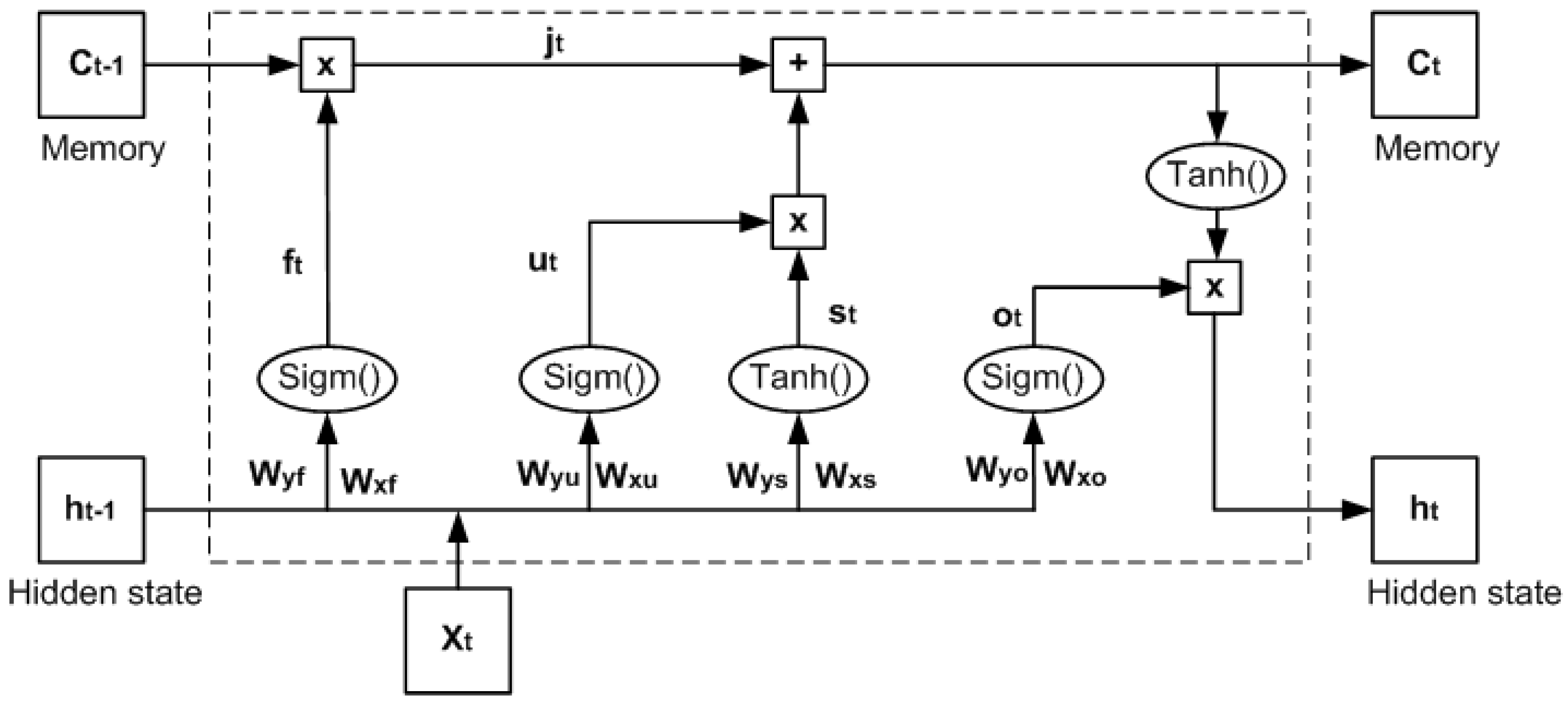
For sleep analysis, long short term memory (LSTM) has also been studied extensively. LSTM was used for the temporal sleep scoring based on a single channel EEG [
31] and multi-channel EEG in combination with MLP [
32]. In addition, other studies reporting sleep quality detection using wearable devices could be improved by applying the LSTM model [
33]. In a sleep staging study using heart rate and wrist actigraphy, a bidirectional LSTM based recursive neural network (RNN) outperformed classic classifiers such as support vector machine (SVM) and random forest (RF) [
34].
1.1. Benchmark Test
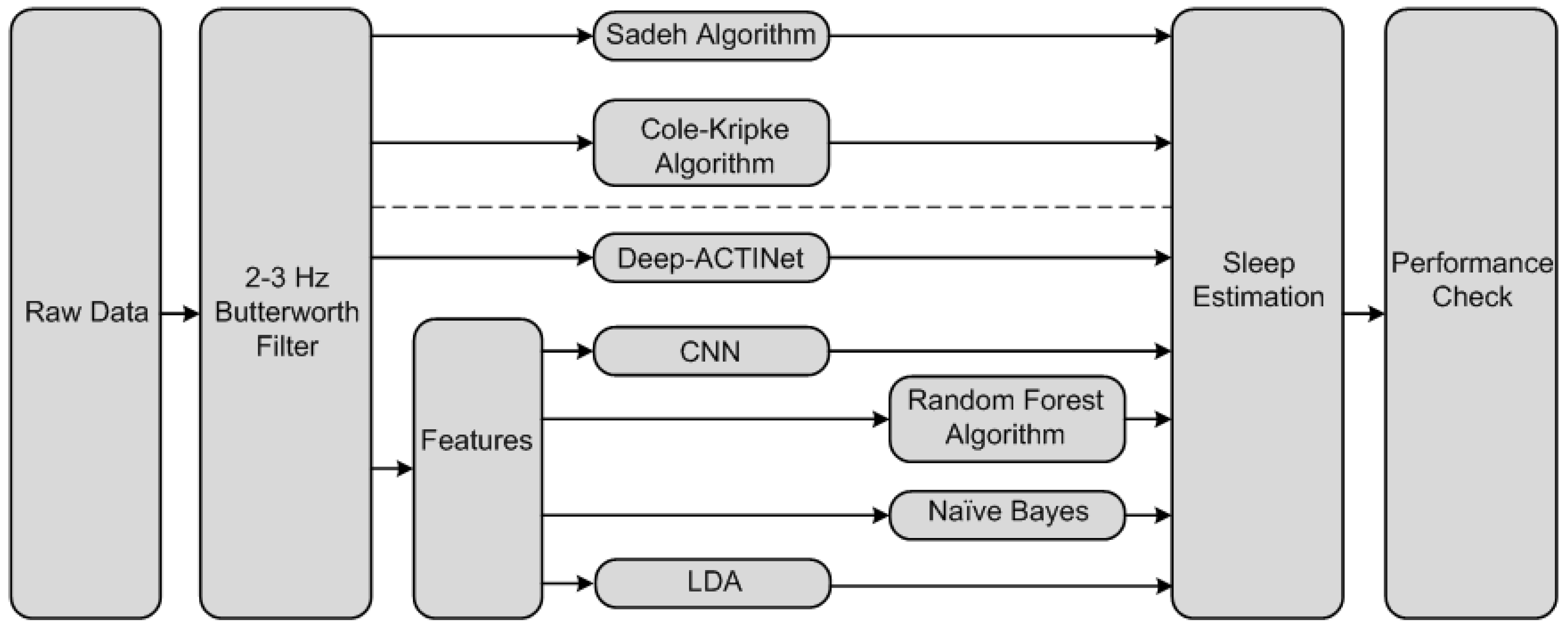
Traditional sleep detection algorithms and three conventional machine learning methods were compared with the proposed algorithm (deep learning architecture using wrist actigraphy (Deep-ACTINet model)), which is described in
Section 2.3, based on the two ground truths of diary bed and diary sleep labels, as shown in
Figure 1. Additionally, a feature based CNN architecture was also designed and tested to investigate the benefit of the end-to-end Deep-ACTINet model.
Figure 1 describes all seven methods implemented in this paper. The first two methods were traditional sleep detection algorithms using the Sadeh and Cole–Kripke algorithms. These traditional methods use activity count to score sleep-wake states. The third method was the proposed Deep-ACTINet, which processes raw data input using one-dimensional CNN (1D CNN) and LSTM to extract the abstract features from the local time slot and solve the long time lag problem. The other methods apply conventional feature engineering to get the features, where 10 features were extracted from the input data. Unlike Deep-ACTINet, the CNN model uses the extracted features as the input instead of raw data. Random forest, naive Bayes and LDA were also employed as conventional machine learning approaches to score the sleep-wake states.
1.2. Traditional Sleep Detection Methods
1.2.1. Sadeh Algorithm
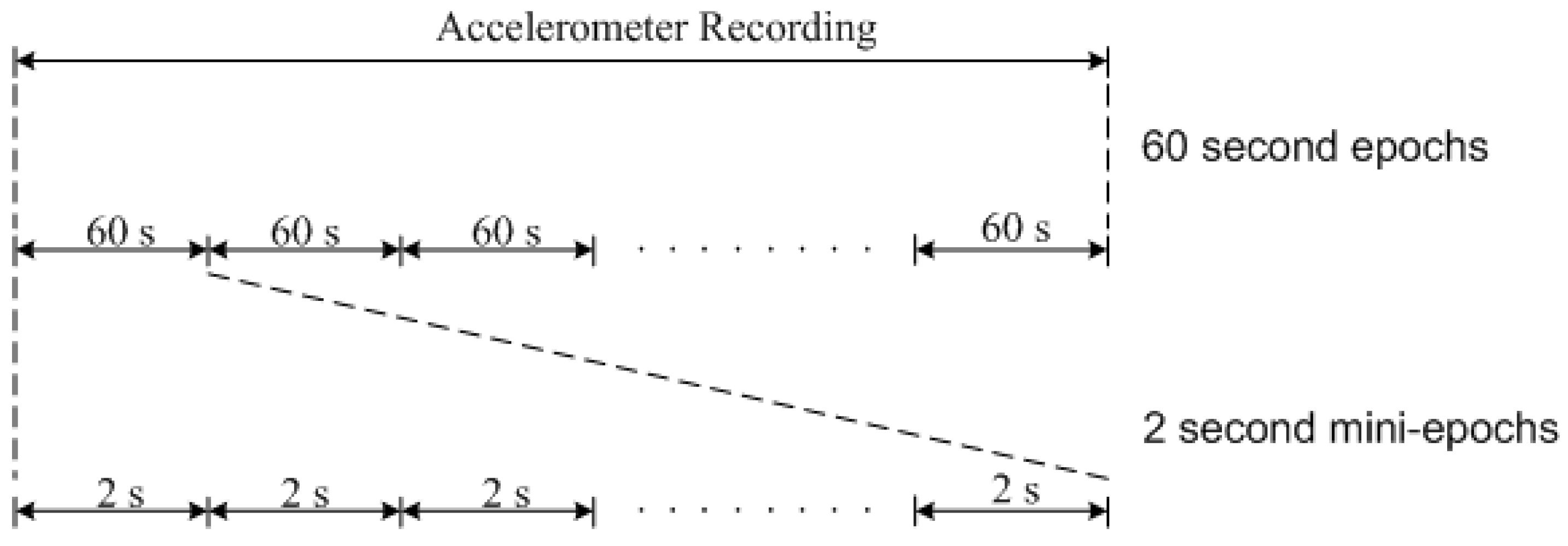
A conventional Sadeh algorithm using the accelerometer data was used in this simulation [
12,
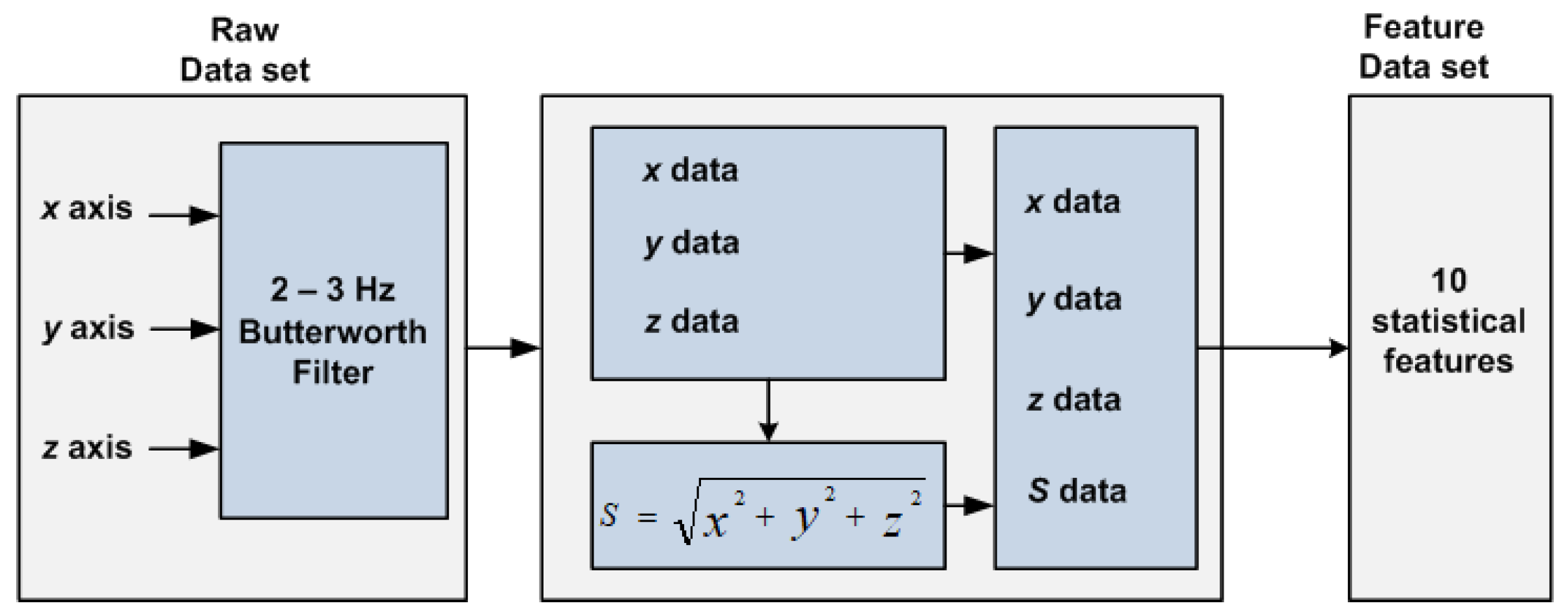
35] with the purpose to identify the asleep and awake states. This method extracts features based on an activity count, which is the number of zero-crossing points during a 2 s mini-epoch. In this algorithm, the zero-point threshold was modified to 0.02 in order to deal with hardware noise. The process of the activity count is illustrated in
Figure 2.
The three-axis accelerometer data were filtered using a Butterworth filter at a frequency of 2–3 Hz. The length of the data was then segmented into 60 s epochs. In a 60 s epoch, the amplitude of the data was calculated using the square root of the three-axis data. The activity was counted when the amplitude of the squared root of the accelerometer data crossed the threshold. A 60 s epoch was segmented into 2 s mini-epochs. Finally, the activity count of each 60 s epoch was counted based on the maximum value of activity in all 2 s mini-epochs.
Four statistical Sadeh features were then employed in the activity count to generate the features of sleep-wake scoring [
12]. These features were the mean of a 5 min window, the standard deviation of a 6 min preceding window, the natural logarithm of the activity count number during the scored epoch + 1 (LOG-Act), and the number of epochs that had activity levels between 50 and 100, including the current epoch (NAT). Finally, a linear regression process was applied to produce a classification output that was like the following.
where
represents the predicted value by the output of linear regression.
X is input data, and a and b are the constant value and regression coefficient of the linear model, respectively.
1.2.2. Cole–Kripke Algorithm
The Kripke algorithm is a traditional sleep estimation algorithm that was proposed by Cole et al. [
13]. It can distinguish asleep states from awake states automatically using movement information from a wristband accelerometer sensor system. Using the fifth order Butterworth filter, The accelerometer data were filtered into 2–3 Hz. After the filtering process, the activity count was calculated. There are several methods for the estimation of the activity count, including MAXACT, SUMACT, zero-crossing mode (ZCM), time-above-threshold (TAT), and proportional-integrating mode (PIM) [
13,
36,
37]. According to a recent study [
38], the PIM activity count method, compared to the other methods, yields the highest accuracy performance. This procedure was then followed by the feature extraction, wherein the extracted features are summated after their own predefined weights are multiplied. If this value exceeded a threshold, the sample was considered to be in an awake state. If not, it was considered to be in an asleep state.
1.3. Conventional Machine Learning Methods
1.3.1. Feature-Based CNN
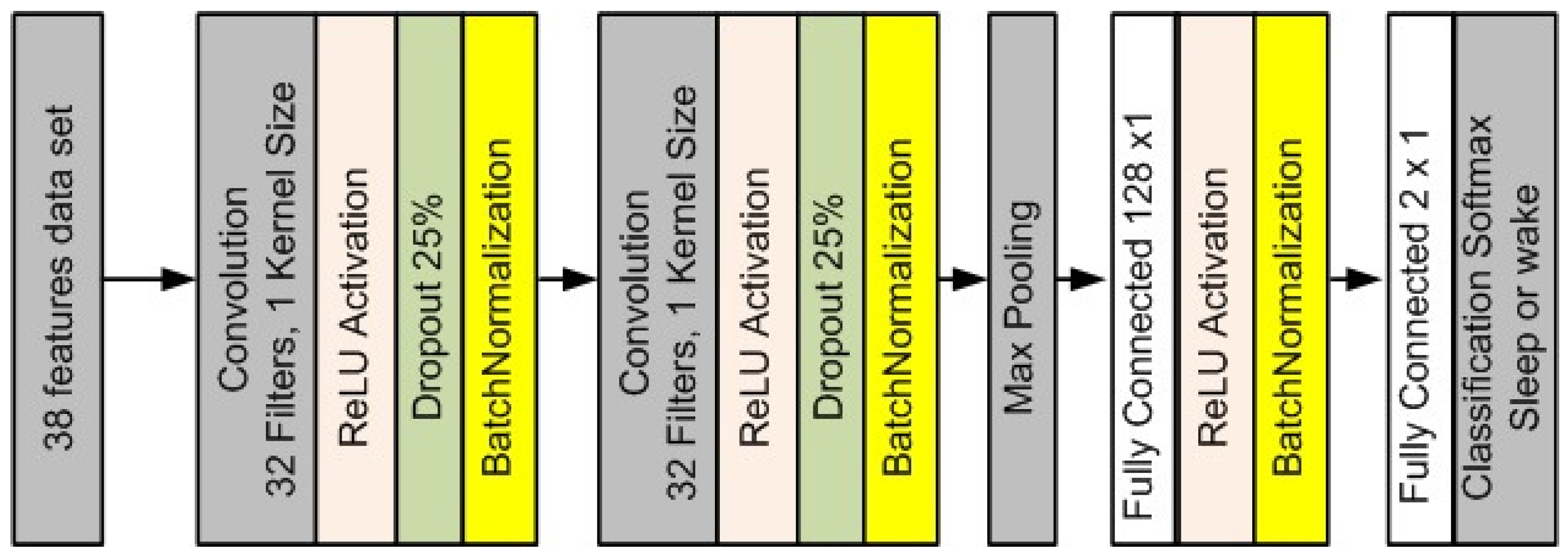
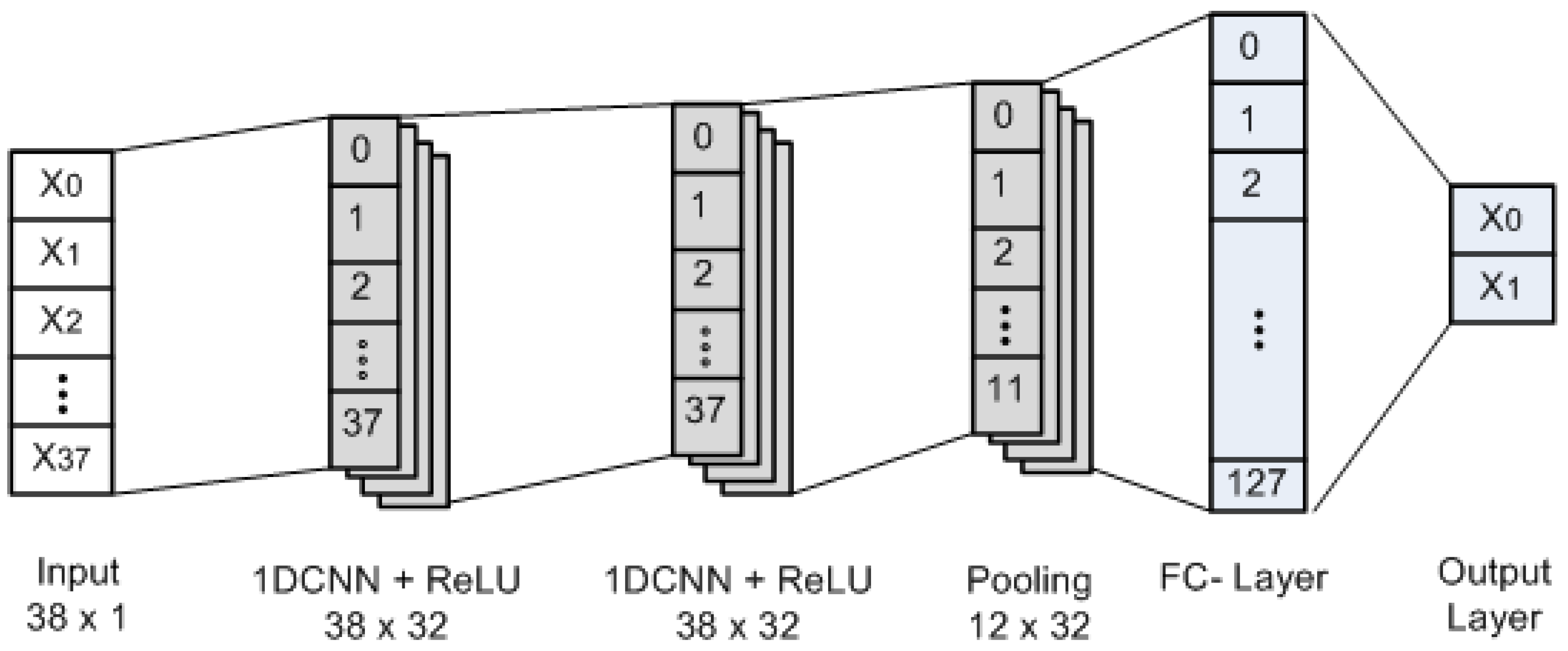
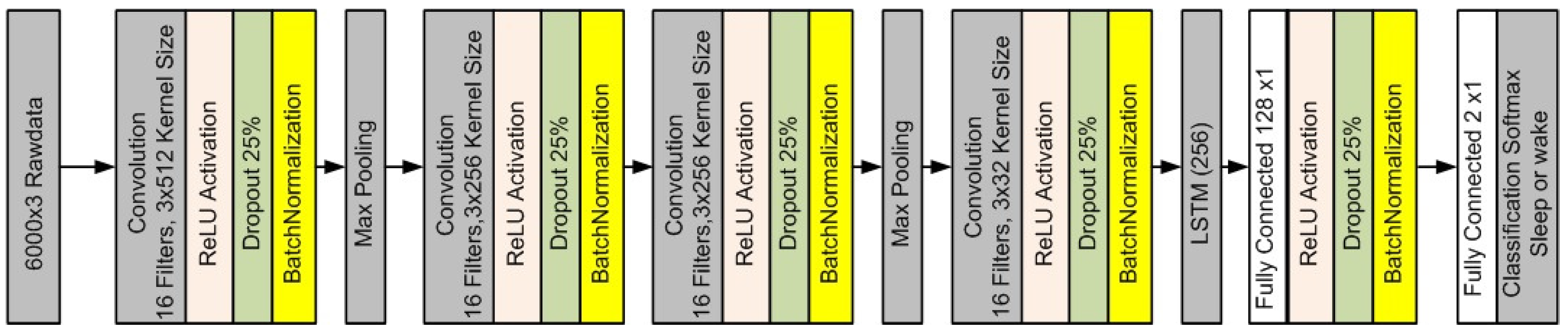
A CNN architecture based on extracted feature input, where the features are obtained via traditional feature engineering methods in time and frequency domains, was constructed. Two layers of a 1D convolution, consisting of 32 convolutional filters with a small receptive field, the ReLU activation function, dropout, and batch normalization, were designed. As shown in
Figure 3, max pooling was performed to reduce the dimensions of the feature map. The stack of the convolution layers was followed by two fully connected (FC) layers, where the first layer was connected to a ReLU activation function and batch normalization, and the second FC layer of size two, corresponding to the number of classes, was followed by a softmax classifier for the final prediction.
1.3.2. Random Forest
Random forest (RF) is an ensemble learning method for classification and regression tasks [
39,
40]. RF, including an additional layer of randomness for bootstrap aggregation, was proposed by Breiman et al. (2001). This machine learning algorithm consists of many decision trees, where each node is divided using the best among the subsets of predictors randomly selected at the node. The results are decided by a majority vote of the decision trees [
39,
41,
42]. This somewhat counterintuitive strategy performs quite well compared to several other classifiers, such as discriminant analysis and support vector machines, and is robust against overfitting [
39].
1.3.3. Naive Bayes
The naive Bayes classifier is based on Bayes’ rule, where it supposes that all features of samples are independent of each other in the context of the class. Owing to this so-called “naive Bayes assumption”, the parameters for each feature could be learned separately, and this obviously simplifies the learning procedure, especially when there is a large number of attributes [
43]. The naive Bayes classifier has been used to predict sleep stages for the diagnosis of health condition using EOG, EEG, and submental-EMG [
44].
where
is a posterior probability function that represents the probability of the class
Y given the input parameter
X. Likelihood function
represents the probability of the observed
X given a set of class
Y, while
represents a prior probability function.
1.3.4. Linear Discriminant Analysis
Linear discriminant analysis (LDA) is a commonly used technique for data classification and dimensionality reduction. This method maximizes the ratio of between-class variance to within-class variance in the dataset, thus guaranteeing maximal separability. LDA does not change the location of original datasets, but only tries to ensure more class separability and draws a decision boundary between the given classes [
18,
45].
In this study, we applied a deep neural network to accelerometer data from actigraphy, using the convolutional neural network combined with LSTM model, which could extract features from raw data without any handcrafted software engineering approaches. This method could be effective for the nonstationary actigraphy data because of its data driven way of building a model by learning the raw data. In addition, the combination of CNN and LSTM was designed to extract features from local time slots and estimate the relationship across the features. The advantage of the proposed model was demonstrated via a benchmark test between handcrafted feature based CNN, data driven DNN architectures, and conventional actigraphy sleep scoring algorithms. Lastly, the explanation for the proposed DNN model is provided via a comparison between the features of the DNN and of traditional methods [
46,
47,
48].
This paper is organized into five sections:
Section 1.1,
Section 1.2 and
Section 1.3 describe the benchmark test using traditional sleep scoring algorithms and conventional machine learning methods.
Section 2 presents the deep learning architectures of the proposed method, CNN + LSTM.
Section 3 explains the details of our research background and evaluation method.
Section 4 presents the results of the experiment. Finally, in
Section 5, we provide some concluding remarks regarding this study.
4. Results
The three-axis accelerometer data recorded during the experiment were classified using these methods that have been mentioned earlier: 2 traditional Sadeh and Cole–Kripke algorithms, 3 conventional machine learning approaches, and 2 deep neural network architectures with or without the feature engineering. Ten-fold cross-validation was performed to evaluate the performance of the applied methods over the ten subjects.
The average accuracy, recall, and precision of the sleep detection results based on the diary bed label are shown in
Table 3, which includes their standard deviations. The proposed model, Deep-ACTINet, produced the best classification performance, with the values of 89.65% for accuracy, 92.99% for recall, and 92.09% for precision, based on the diary bed label.
Table 4 presents the average of accuracy, recall, and precision for the diary sleep label. In this case, Deep-ACTINet also outperformed the other methods, with the values of 88.77% for accuracy, 92.96% for recall, and 90.39% for precision. Not only was the value of scoring parameters the highest, but the standard deviation was also relatively smaller than the others.
It was confirmed that the average performance on the diary bed label was better than the average performance on the diary sleep label. That was because the subjects lying in bed, but not sleeping could be interpreted as sleep states by a classifier using an accelerometer.
Acc.DBL, Acc.DSL, Rec.DBL, Rec.DSL, Pre.DBL and pre.DSL represent the accuracy, recall, and precision, respectively, of the diary bed label and the diary sleep label, respectively. For rigor, the differences in the accuracy, recall, and precision between Deep-ACTINet and the other methods were also investigated using the one tailed paired sample
t-test, as shown in
Table 5. Overall, it could be seen that the performance improvements by Deep-ACTINet were statistically significant, with
p-values less than 0.05 or 0.01.
Figure 8,
Figure 9 and
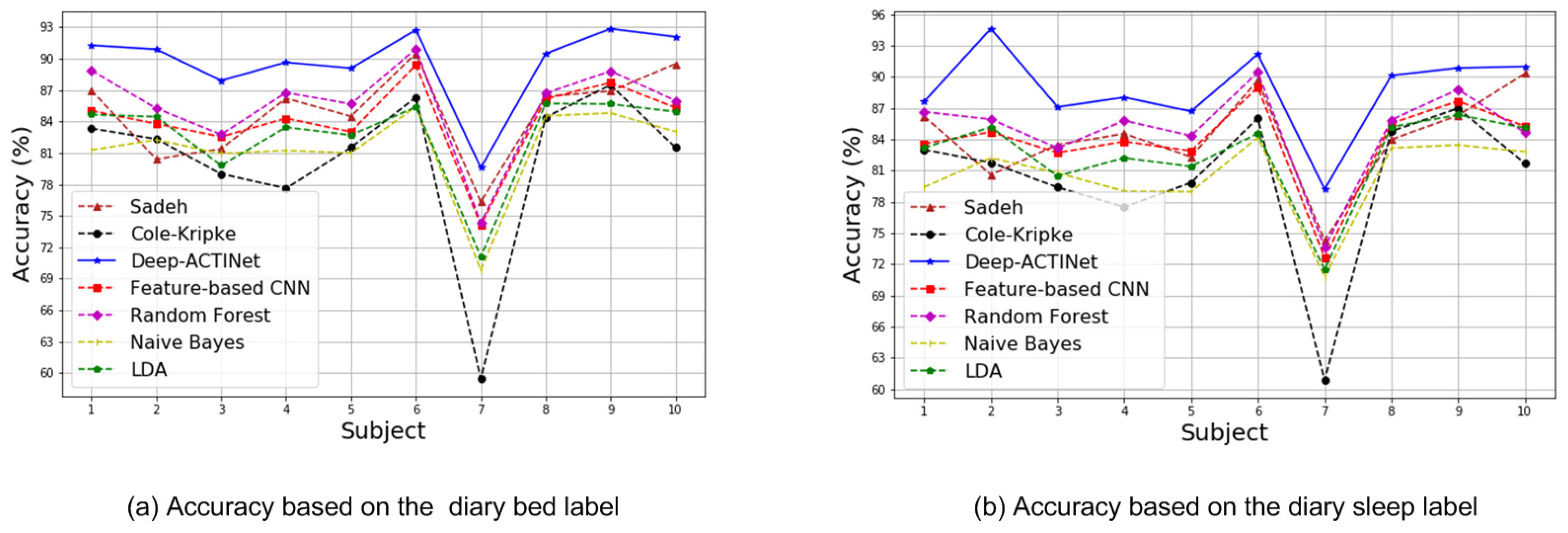
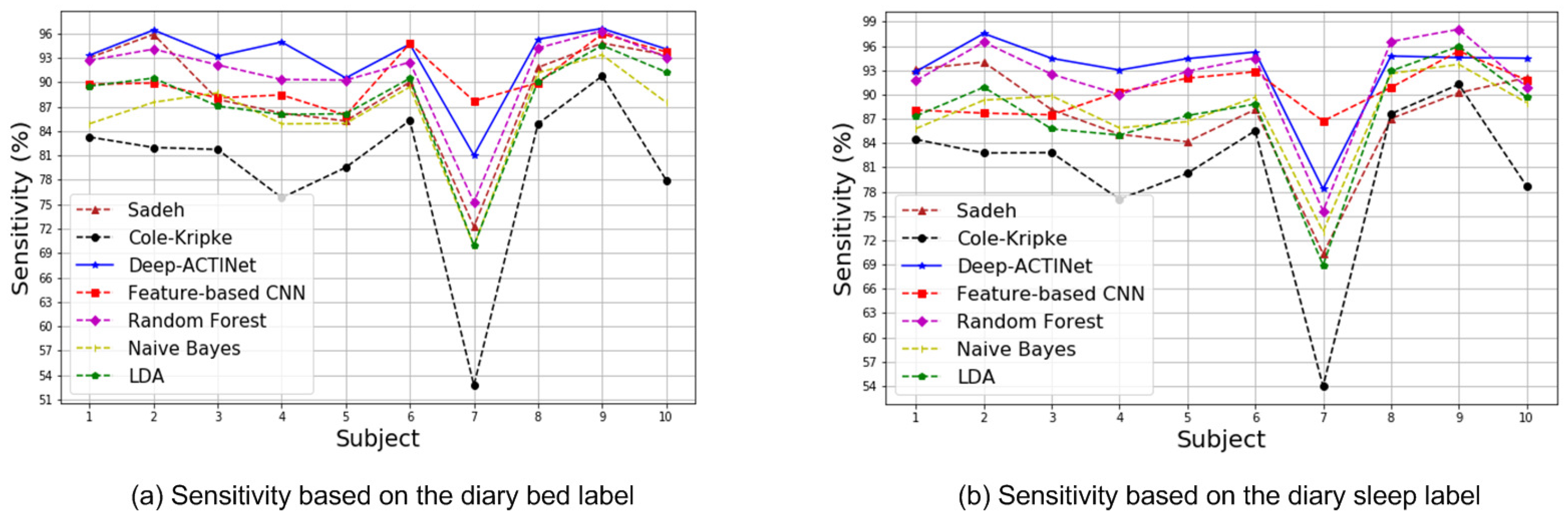
Figure 10 show the results for the average accuracy, recall, and precision, respectively, of the subjects across 60 epochs. Note that Deep-ACTINet outperformed the other conventional classifiers based on both the diary bed labels and diary sleep labels, as shown in
Figure 8. Subject 9 obtained the highest accuracy based on the diary bed labels, at 92.86%, whereas Subject 7 had the lowest, at 79.58%. Meanwhile, Subject 2 yielded the highest accuracy based on the diary sleep label, at 94.65%, and Subject 7 still had the lowest accuracy, at 79.21%.
Figure 9 illustrates the performance in terms of recall, emphasizing the TP rate among all the condition positive samples [
57], that is sleep in this experiment. It was demonstrated that the proposed Deep-ACTINet produced the highest average recall value across all subjects based on both the diary bed labels (92.99%) and diary sleep labels (92.96%).
Figure 9 also shows that Subject 7 had the lowest value of recall among all the subjects.
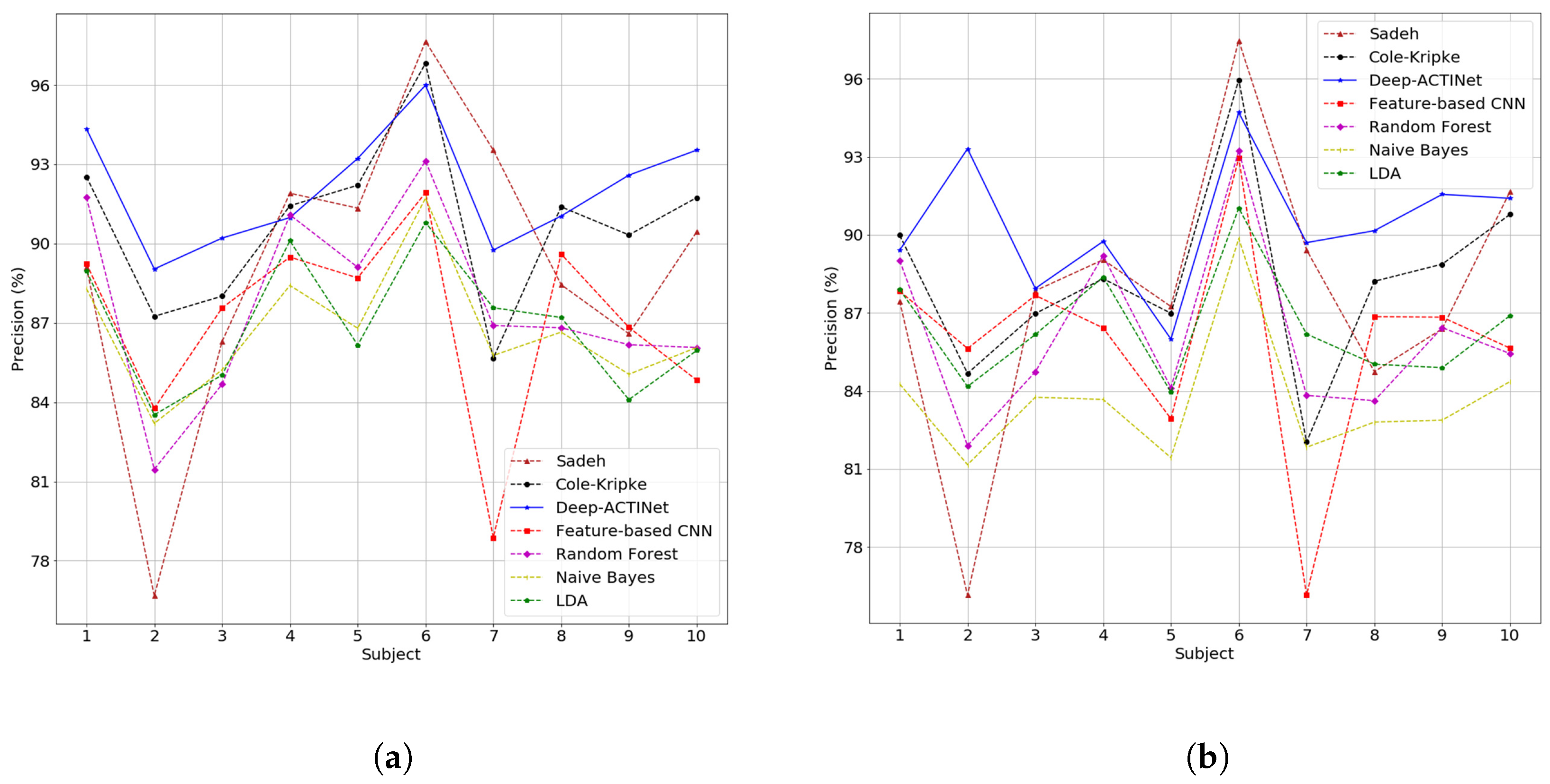
Figure 10 illustrates the performance in terms of precision, showing the TP rate among the predicted samples as a sleep state. Even for this metric, it was confirmed that Deep-ACTINet obtained the highest average precision based on both the diary bed labels (92.09%) and the diary sleep labels (90.39%). Even though the Sadeh algorithm reached the highest precision for Subject 6, overall, Deep-ACTINet was superior compared to the other methods.
Additionally, the two neuron outputs of Deep-ACTINet just before the final classification output were thoroughly examined to compare their significance with those of the conventional feature engineering methods.
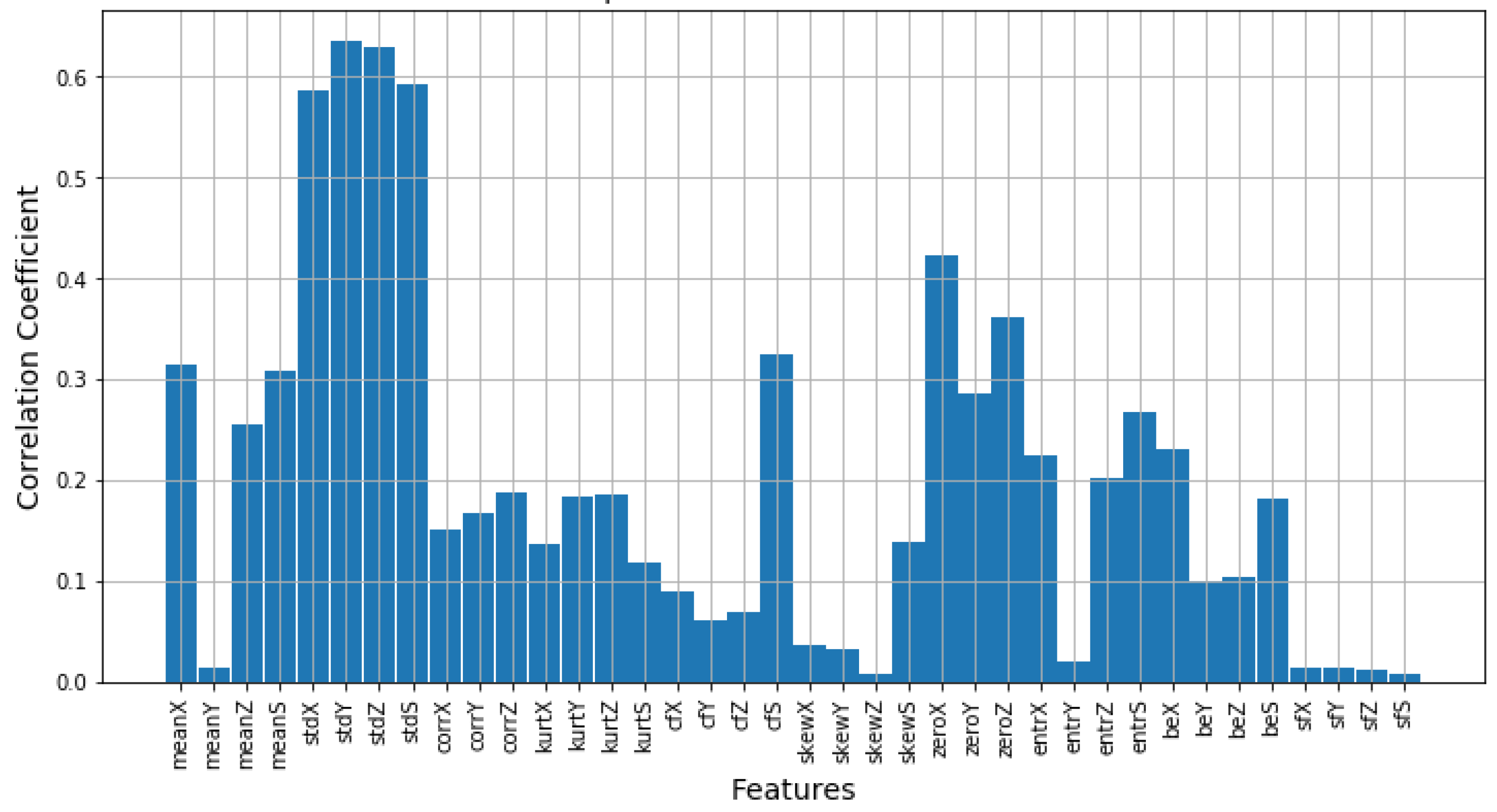
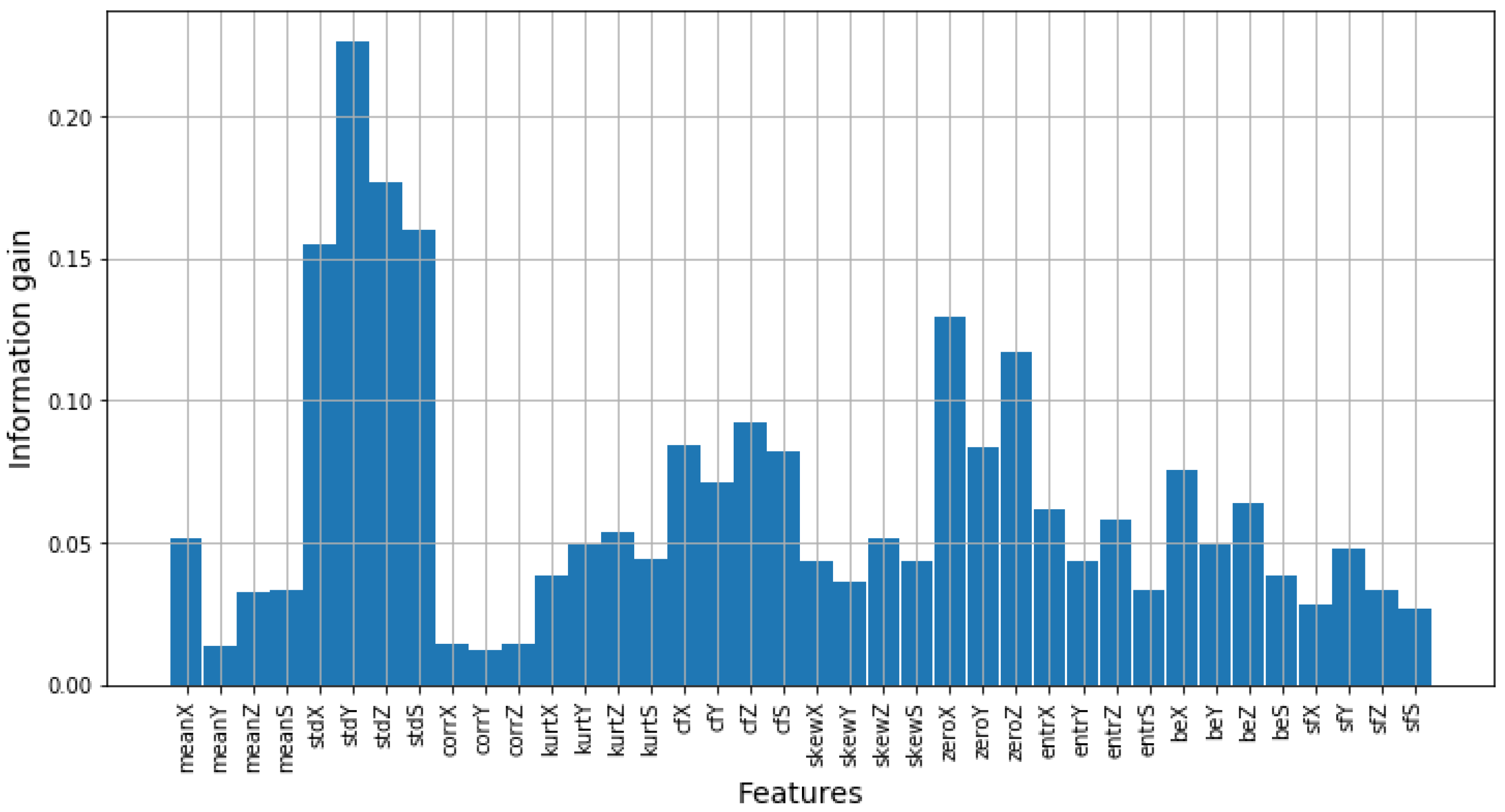
Figure 11 describes the average correlation coefficients between the two outputs generated using Deep-ACTINet and the 38 conventional feature engineering features extracted in the time and frequency domains. The standard deviations of X, Y, Z, and S were noted to have strong correlations with the output of Deep-ACTINet, and the numbers of zero-crossing points of X and Z were also highly correlated with each other. In addition, the mutual information between the 38 features and class labels was calculated to find the effective features for sleep monitoring; the results are displayed in
Figure 12, which shows the standard deviations of X, Y, Z, and S and the numbers of zero-crossing points of X and Z having large amounts of information. The visualization denotes that these features would be better than the others, and thus, these features could be used primarily for the classification [
58]. Interestingly, the patterns of
Figure 11 and
Figure 12 are quite similar, from which we could infer that Deep-ACTINet extracted the most significant two outputs with highly efficient abstractions of the raw accelerometer signals to the sleep state. This characteristic could explain why the proposed deep learning architecture led to the improvement of classification performance.
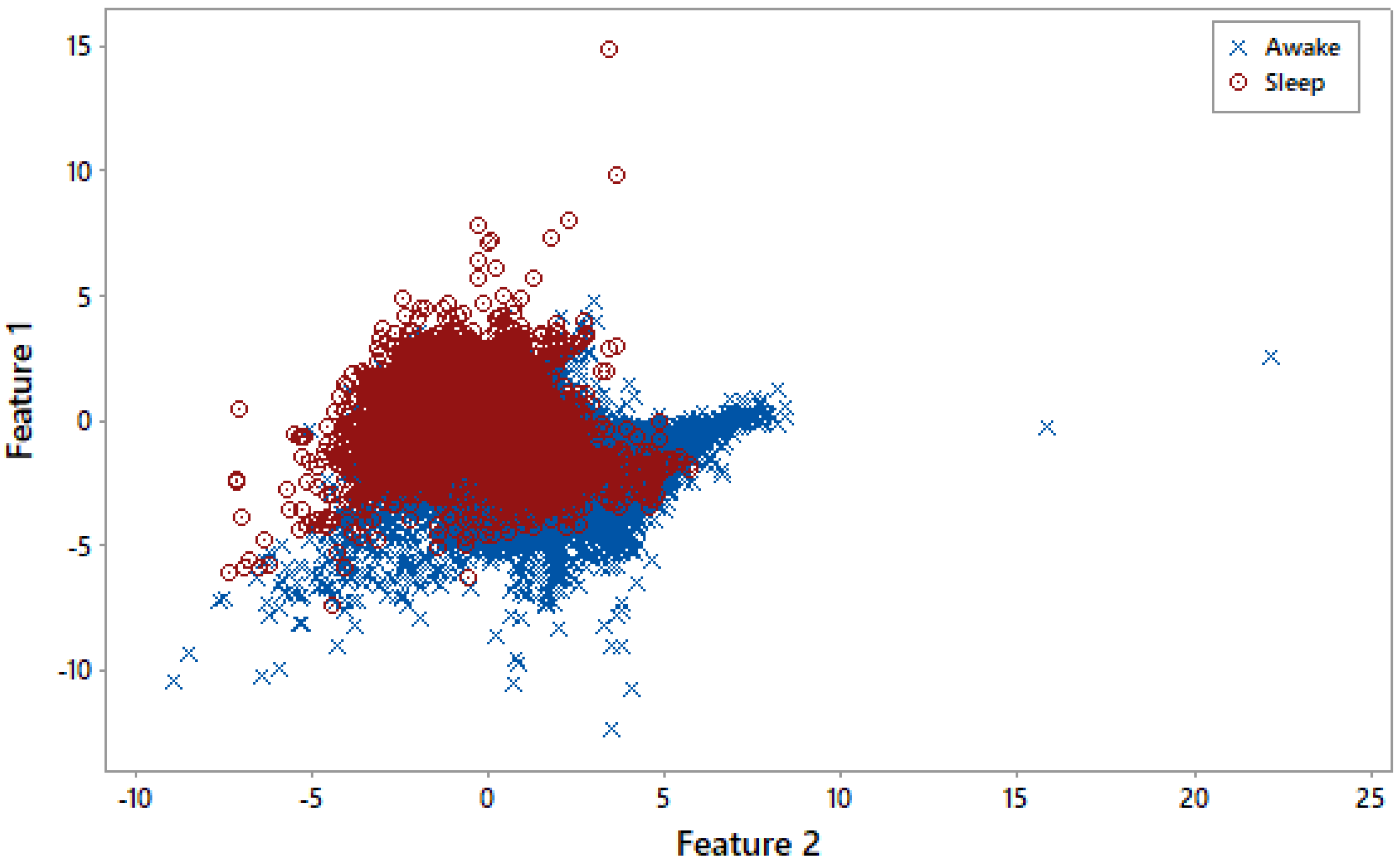
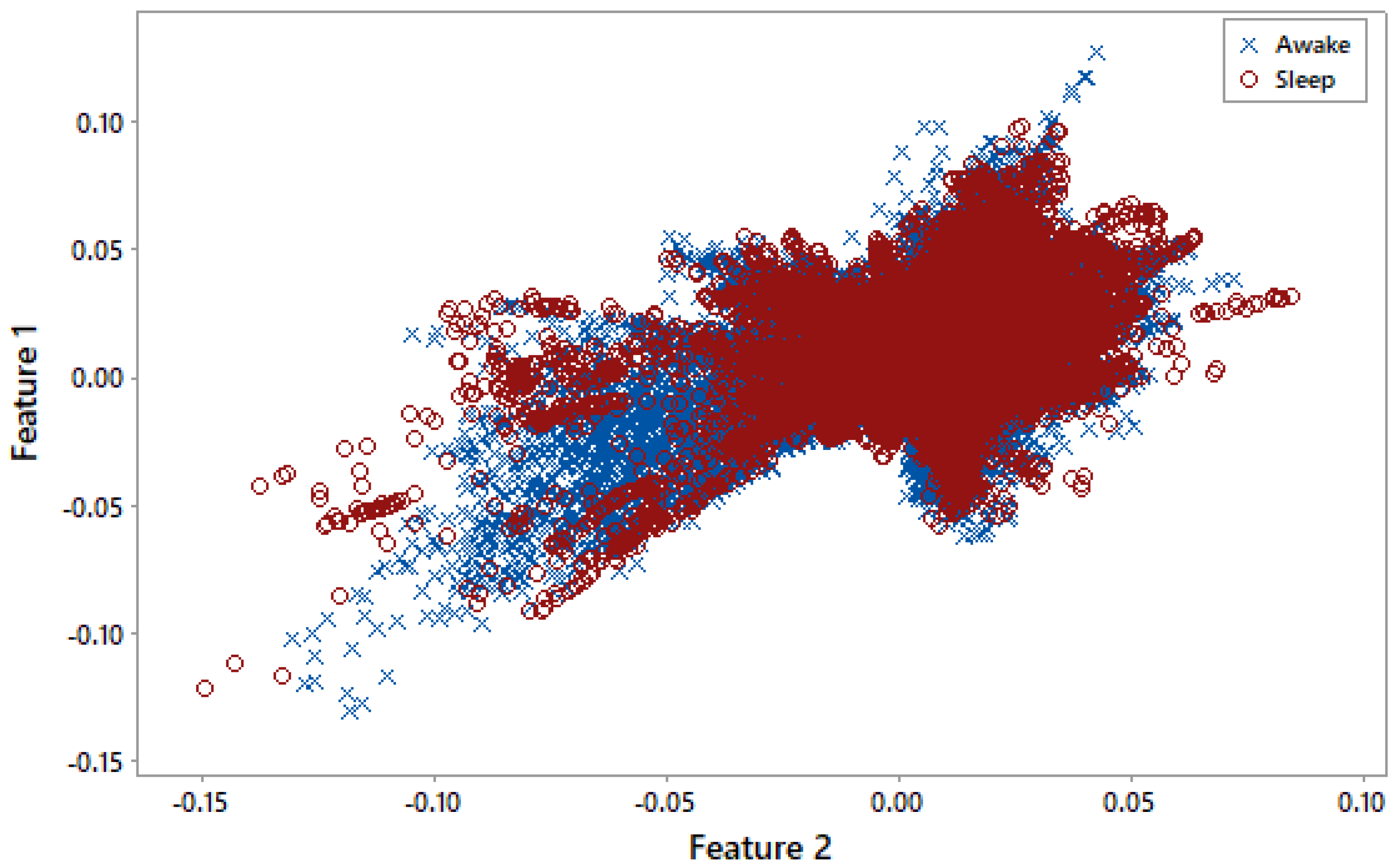
Figure 13 and
Figure 14 depict the scatter plots of the last two outputs of Deep-ACTINet and feature based CNN, respectively, corresponding to the sleep states. These visualizations of the neuron outputs using the two deep learning models illustrate a little better separation of the end-to-end Deep-ACTINet outputs compared to that of the feature based CNN outputs, resulting in a higher classification rate. This result suggests that the data driven end-to-end architecture of Deep-ACTINet could be a more natural way to extract generic properties of the raw accelerometer data than the pre-defined model based feature engineering approaches.
There is also the relation between the last two outputs of the CNN + LSTM and those of the feature based CNN, where each sample was arranged according to the ground-truth. Because these two outputs were the inputs of the last softmax activation function, it could be expected that this negative relation could be seen more clearly, and each sample could be classified better. In
Figure 13, it can be observed that sleep-wake states were divided much better than in
Figure 14. These results support the notion that this end-to-end approach was more powerful than feature based CNN.
5. Discussion and Conclusions
In this study, several machine learning algorithms were tested for the estimation of asleep and awake states, compared with the traditional static model based algorithms, the Sadeh and Cole–Kripke algorithms. It is crucial to design a general model, by training machine learning algorithms, that is not overfitted to the training dataset that would otherwise limit it to working only for a few subjects. In order to avoid this overfitting problem, the machine learning algorithms in this research were designed via intersubject training, that is the training dataset did not include any test subject data. It was noted that the proposed deep learning model, Deep-ACTINet, produced generalized models that predicted the asleep and awake states with high accuracies, which was tested with a dataset that was not used in training. Remarkably, this proposed model significantly outperformed the most popular actigraphy algorithms, such as Sadeh and Cole–Kripke, suggesting that Deep-ACTINet could replace the current algorithms in wristband type wearable devices.
The sleep state classification based on two different sleep diaries, diary sleep and diary bed, was conducted in this experiment, and the performance based on the diary bed labels was better than the others. This is understandable considering the limitation of the accelerometer sensor, which only monitored the movement of a subject. Without any other physiological sensor, the accelerometer itself could not tell the difference between lying down without movement and actual sleeping. For future work, this would be solved with additional physiological data such as electroencephalogram (EEG), electrocardiogram (ECG), electromyogram (EMG), and so on.
This paper demonstrated an end-to-end data- driven deep learning model, Deep-ACTINet, that extracted the accelerometer features more efficiently than conventional feature engineering methods and eventually yielded higher sleep and wake separation rates compared with those of the conventional fixed model based and machine learning based algorithms. This was proven by the feature studies, where the neuron outputs by Deep-ACTINet were highly correlated with only the most significant conventional features. Furthermore, Deep-ACTINet was trained via intersubject training and thus yielded a general model that worked for all subjects. This result could suggest that sleep and wake detection algorithms in current actigraphy systems could be replaced by Deep-ACTINet.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}